NexCOBOT Taiwan
13F, No.916, Zhongzheng Rd., Zhonghe Dist., New Taipei City, Taiwan 23586, R.O.C.
TEL: +886-2-8226-7786
一站式EtherCAT运动控制解决方案
创博 控制器的最佳选择
▶ 完善的整体解决方案
节省软件开发时间成本,软硬整合时程,随装即用
▶ 经验丰富的设计验证团队
由专注运动控制软件研发及软件固件技术团队,提供性能调适、稳定的作业系统
▶ 让您信赖的高可靠度产品
针对机器人与CNC运动控制设计,制定完整的设计及严格验证规范
▶ 免费开发套件及安心的售后服务
提供在线完整训练课程、使用手册及实时在线技术咨询
NexECM 产品特色
|
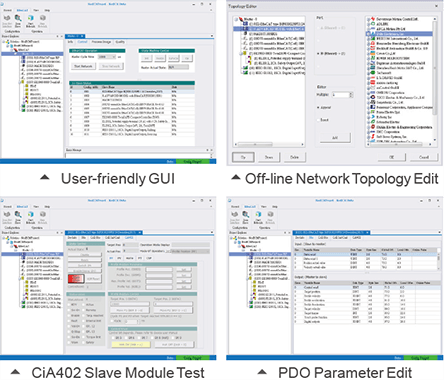
专业软件功能 • ESI档案读取 • ENI输出功能 • 可编辑PDO档 • CoE初始命令编辑 • EtherCAT网络拓朴编辑(Online或Offline) • EtherCAT通讯测试 • EtherCAT从站操作测试 |
实时作业系统 • Windows: RTX & In-Time • Linux: NexRTOS NexRTOS • 提供高精度定时器和抖动 • 可配置的CPU资源和内核 • IST位于独立CPU内核 • 自定义线程优先级 • 实时操作系统性能&抖动效用 |
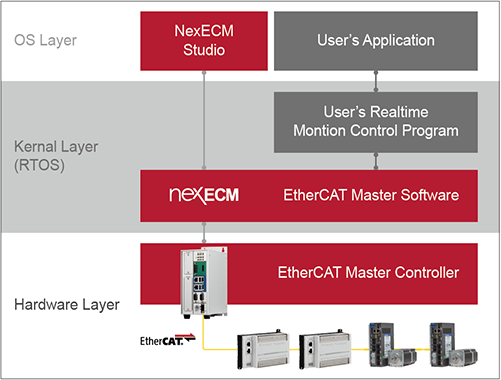
软件架构图 |
EtherCAT 软件工具–NexECM Studio |
 |
 |
硬件推荐 (X86 Intel® Inside)
 |
 |
 |
 |
|
EtherCAT Master |
High-performance EtherCAT |
ECM-102B EtherCAT Master |
ECM-200B High-performance EtherCAT |