NexCOBOT Taiwan
13F, No.916, Zhongzheng Rd., Zhonghe Dist., New Taipei City, Taiwan 23586, R.O.C.
TEL: +886-2-8226-7786
NexECM EtherCAT 主站控制器
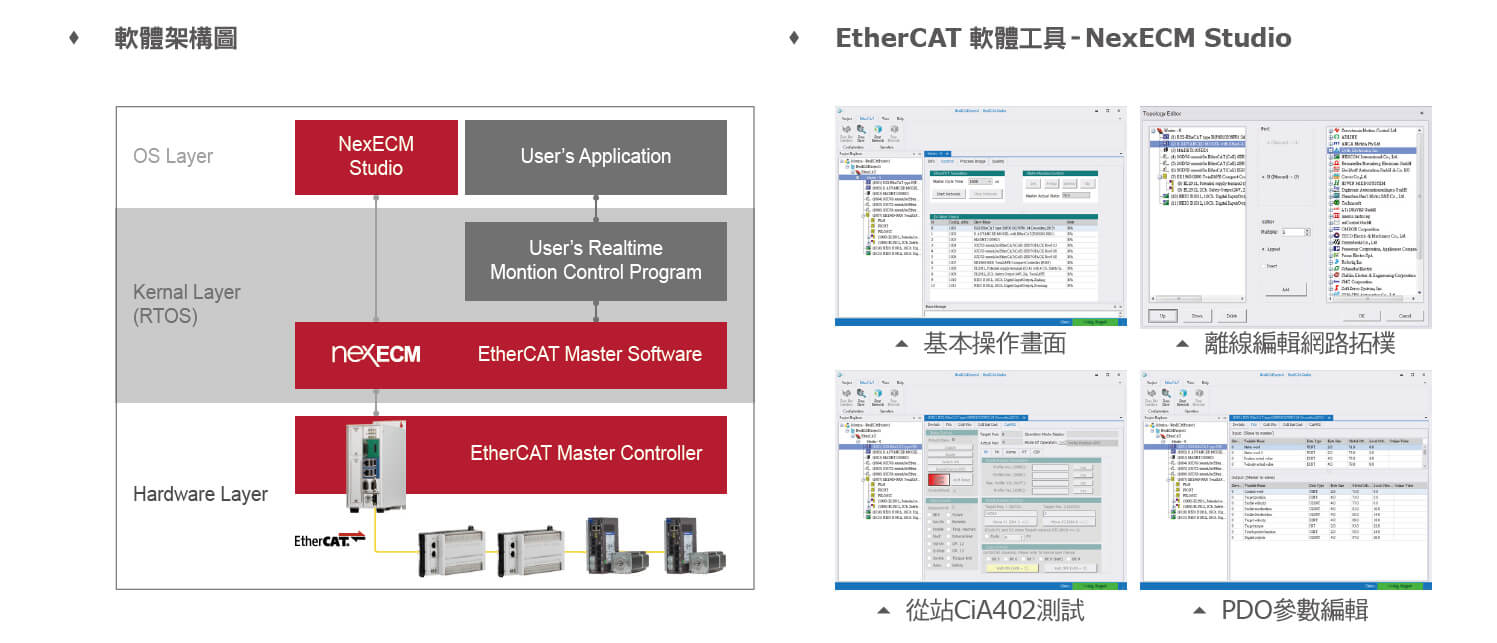
EtherCAT为现今分散式运动控制器的通讯主流,具有高实时性、高扩展性、高稳定性等特点。创博提供专业EtherCAT主站控制器, 让使用者可以快速建置EtherCAT控制系统,透过NexECM软件,使用者可以在实时作业系统环境下开发专属的EtherCAT运动控制。 控制器的开放式架构让使用者在Microsoft® Windows环境中可轻松整合第三方软、硬件,发展EtherCAT相关加值应用。
产品特色 |
|
|---|---|
|
|
订购资讯
-
ECM-110F (P/N: 98ECM110F000F)
EtherCAT Master Controller, Intel® Celeron® processor J1900 Quad Cord 2.0GHz -
ECM-211F (P/N: 98ECM211F000F)
High-performance EtherCAT Master Controller, Intel® 6th Core™ i5-6500TE processor