NexCOBOT Taiwan
13F, No.916, Zhongzheng Rd., Zhonghe Dist., New Taipei City, Taiwan 23586, R.O.C.
TEL: +886-2-8226-7786
高效運算結合AMR 創博機器人軟硬整合平台大幅縮短開發時程
創博發表AMR專屬控制平台RCB600,大幅縮短AMR開發時程,加速企業數位轉型。Digitimes報導
因應後新冠時代、中美貿易戰、供應鏈缺料未有明顯改善,到近日台海緊張局勢等國際事件,仰賴廉價人力的製造業遇到招工困難、疫情造成工廠斷續停工,產能無法維持固定生產水平,更遑論提升效率,因此加速製造業對於數位轉型的急迫性,導入工業4.0整廠解決方案,建置少人化的全數位與智能營運工廠,也就是所謂的智慧製造。
其中在工廠現場佈建自動化系統與移動式機器人(AMR)車隊,以可排成的高效時間稼動率,來補足不穩定的人力需求,甚至是加上預知維護保養功能,減少不預期的停機時間,不僅提供穩定的作業成效,更可將產能提升到極致,更重要的是可計劃性設定的最佳或最短工作程時間,靡除生產時間上的浪費,搭配MES(製造決策系統)與APS(先進排程系統),更可彈性調度產能,完全掌握工廠、產線、機台、生產途程的即時狀態。
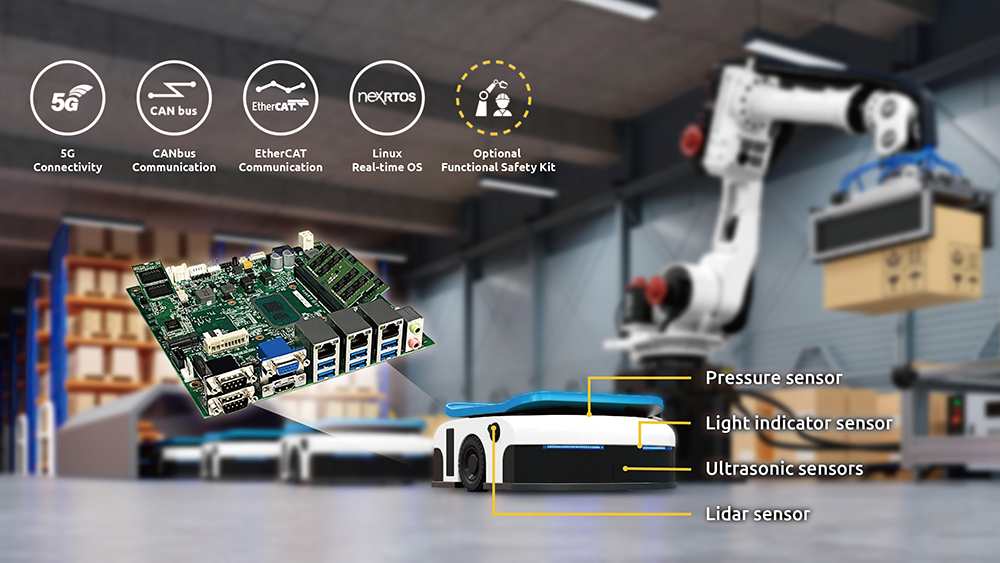
專注於機器人控制器的創博(NexCOBOT)快速反應此市場需求,以專長的PC-based 控制器客製化能力,發表RCB600控制平台,搭載了Tiger Lake UP3第11代Intel Core i處理器與Linux實時作業系統NexRTOS。內建Intel TCC(時序協調運算可加速NexRTOS實時作業系統性能,提供穩定的快速時間週期響應(1毫秒)與低延遲(<30 us),讓AMR的移動與控制更為精準與快速。高效能的CPU與GPU結合,更能滿足運動控制、路徑規劃、導航與視覺辨識為一體的整合應用,除了減少硬體架構的複雜度,在軟體開發方面更是減少跨軟體與平台的開發時間。在AI應用方面,利用Intel OpenVINO 與 Intel DL Boost更能加速視覺辨識與路徑導航應用的推論速度,更高頻率的更新座標位置與NexRTOS 上的運動控制系統結合,透過工業通訊介面CANbus、EtherCAT即時控制馬達,完成快速且精準工站位置移動與搬運工作的要求。
創博總經理沈倩怡指出,在少人工廠建置的趨勢下,在兩岸已經與科技廠和機器人製造商有專案和產品在進行。AMR除了提供軟硬體的開發平台外,更要提供熟稔的多作業系統與多核獨立控制軟體客製化服務。客戶會在Windows平台上開發視覺辨識、設備與系統連接的應用,會在Linux以ROS(開放性機器人作業系統)及其SLAM(simultaneous localization and mapping/同步定位與地圖構建)套件,來開發無人車路徑規劃與機器人控制的應用,也會在RT Linux開發馬達的運動控制系統,並需要透過24V DI/O整合周邊的工業控制原件,還有提供穩定的電源驅動整體AMR控制系統,也要符合IEC 61326-3-1的EMC規範,確保設備抗電磁干擾,此跨領域與整合開發門檻高,但創博提供客戶一站式的解決方案與客製化服務,降低軟硬整合開發難度、縮短開發時程、並降低硬體成本,因此行業內的客戶會很積極地跟創博合作開發AMR。
展望下半年與2023年,創博將以世界唯一的PC-based SIL2/3 機器人功能安全控制平台結盟德國智慧機器人技術,發表符合IEC 61508規範的機器人控制解決方案,來進軍歐美日機器人製造商。此基於Intel Elkhart Lake的PC-based控制平台,將帶動協作型機器人關鍵技術的人機協作製造應用。