NexCOBOT Taiwan
13F, No.916, Zhongzheng Rd., Zhonghe Dist., New Taipei City, Taiwan 23586, R.O.C.
TEL: +886-2-8226-7786
2021
08
13
运动控制平台及客制化服务
创博基于工业自动化、数控机床、机器人、人工智能以及机器视觉等应用相关的垂直产业,以专用机的概念,提供一站式客制化服务。
为助力复工复产,即日起至2021年11月10日,凡购买创博控制器平台,即可获得免费运动控制软件NexGRC/NexGMC/NexECM,同时享有免费课程培训,以及案例分享及实作练习,让您在使用过程中没有后顾之忧。数量有限!限时优惠,赶快联系我们来了解详情吧!
 |
 |
 |
| NexGRC |
NexGMC | NexECM |
| EtherCAT运动控制软件 |
EtherCAT运动控制软件 | EtherCAT主站控制软件 |
| • 支持机器人构型:直角坐标, SCARA, Delta, 6轴关节式 • 可透过软件模拟机器人动作 • 机器人点对点及补间动作 • 可进行工具、BASE设定 • 提供Windows API |
• 支持64轴单轴运动控制 • 支持8个群组控制 • 单轴控制: PTP/Jog/Halt/Stop功能 • 群组控制: PTP/linear/3D arc功能 • 提供Windows API • 提供工具软件NexMotion Studio |
• 标准EtherCAT通讯 • 支持至多64从站 • 最快250us通讯周期 • 支持DC, PDO, SDO, CiA402, CoE, FoE • 提供Windows API • 提供工具软件NexECM Studio • 可读取ESI及汇出ENI |
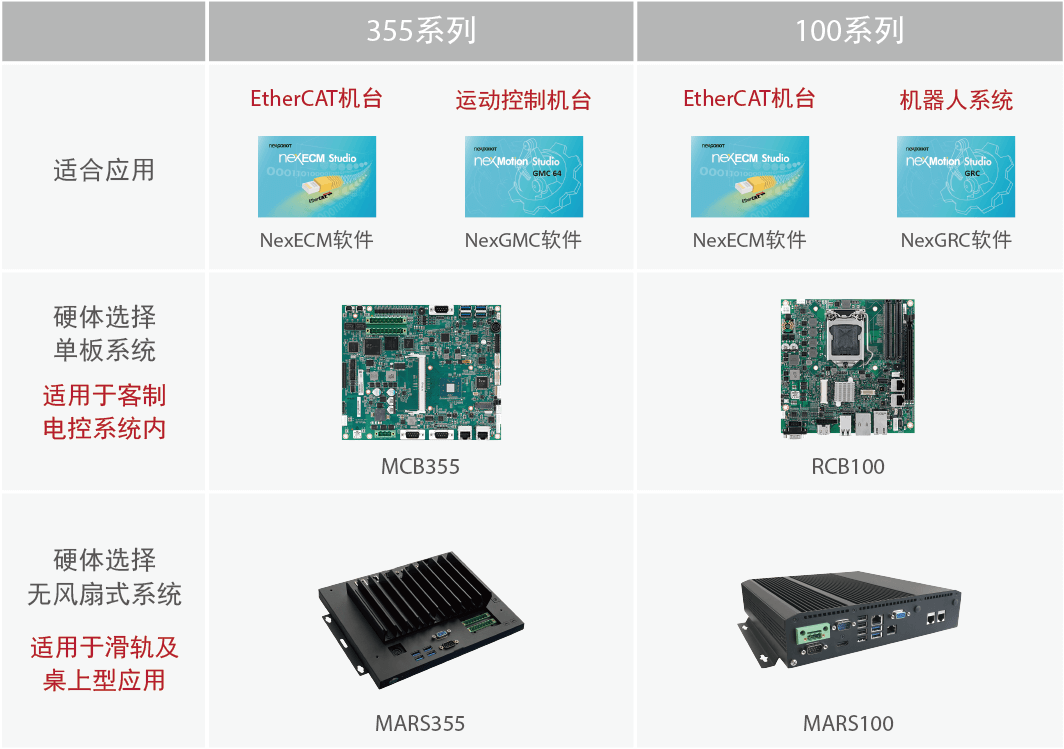
运动控制平台相关产品
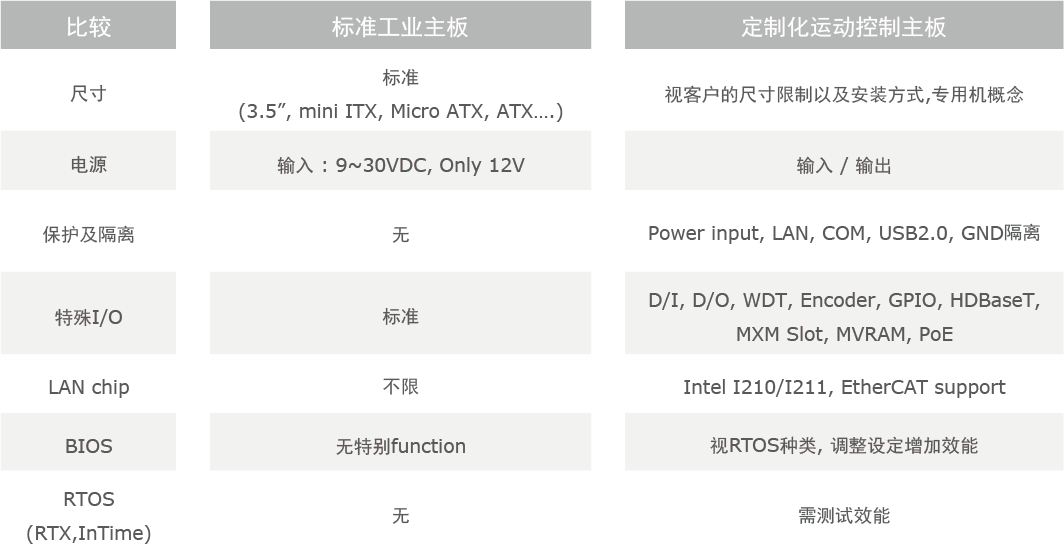
标准工业主板与定制化的运动控制主板差异